Robotica medicale: componenti evoluti per un settore in crescita
by 2 Luglio 2018 10:24 0

Un settore dinamico, buone prestazioni dell’export e normative che incoraggiano l’innovazione: indicatori positivi per il segmento dell’elettromedicale. Uno sguardo alle più interessanti applicazioni del segmento, dove la qualità dei componenti è fondamentale.
di Stefano Vinto
Un mercato globale con previsioni di forte espansione, che si prevede raggiungerà i 530 miliardi di dollari entro il 2022: è il settore dei dispositivi medici, caratterizzato da elevati tassi di innovazione. Anche in Italia il segmento mostra un andamento positivo: storicamente caratterizzato da un peso molto elevato degli ordinativi della sanità pubblica, sta evolvendosi nel senso di una maggior diversificazione, con un incremento delle esportazioni di oltre l’8% nel 2016.
Un incentivo all’innovazione viene dalla necessità di conformarsi al quadro normativo, comprensibilmente stringente, che regola il settore: in base alle leggi che regolano il comparto, oltre al produttore del dispositivo medico, anche i fornitori dei componenti rispondono della qualità del loro prodotto, nel caso si accerti che il malfunzionamento è dipeso dalla parte in esame. Per questo motivo è fondamentale il rispetto delle buone pratiche di costruzione e il superamento di tutti i controlli di qualità imposti dall’uso al quale il componente verrà destinato.
Da rilevare la necessità di adeguare anche i dispositivi esistenti alle regolamentazioni; a fronte dell’evoluzione del quadro normativo, molti dei macchinari in uso possono rivelarsi obsoleti, aprendo ottime prospettive per le aziende in grado di sostituirli con apparecchiature conformi ai nuovi requisiti.
Le innovative soluzioni proposte dalla robotica medicale trovano applicazione in diversi settori clinici, come la neurochirurgia, la chirurgia ortopedica, dentale, oculistica, otorinolaringoiatrica, la laparoscopia addominale e la radiochirurgia.
La robotica medicale può essere raggruppata in quattro categorie principali: robotica di posizionamento, di replica del movimento, di imaging, protesica e riabilitativa. Robotica di posizionamento. Vediamo in dettaglio questi segmenti.
ROBOTICA DI POSIZIONAMENTO. Nella robotica di posizionamento, la movimentazione del paziente sottoposto ad intervento chirurgico deve essere tale rispecchiare le scelte preliminari relative, ad esempio, al piano di intervento scelto. Per tale scopo, le attrezzature medicali di supporto fondamentali, come i tavoli operatori, devono essere tali da consentire una movimentazione ottimale, precisa e modulare nella massima sicurezza. Una tipologia di limitatore di coppia ricorrente è quella ad arresto di sfere, di seguito rappresentata in forma semplificata:
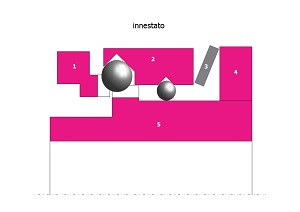
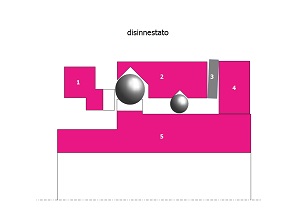
Il componente 1 rappresenta la parte condotta del giunto, mentre la parte 5 la parte motrice. Quando la coppia sulla parte condotta supera la coppia impostata (variando il precarico della molla a tazza 3, tramite la regolazione del componente 4), il meccanismo si disinnesca grazie al componente 2 che sposta le sfere fuori dagli alloggiamenti presenti nel componente 1, vincendo appunto il precarico della molla. La coppia cala improvvisamente, fornendo la protezione del servomotore, il cui albero è calettato sul componente 5. Si tenga presente che tale tipo di giunto, quando innestato, trasmette la coppia senza gioco.
E’ anche fondamentale, in tal senso, l’utilità dei giunti a soffietto, in quanto consentono di ottenere accoppiamenti con bassa inerzia, assenza di giochi ed alta rigidità torsionale. Nell’ambito della ricerca clinica, trovano largo impiego gli autocampionatori. Tali sistemi robotici sono di tipo cartesiano e vengono usati per la gascromatografia-spettrometria di massa.
ROBOTICA DI REPLICA DEL MOVIMENTO
Le configurazioni robotiche viste in precedenza possono essere impiegate anche in situazioni in cui è richiesta la replica del movimento delle mani di un chirurgo, durante l’esecuzione di un intervento. A tale scopo, si impiegano sistemi di sensori che rilevano i movimenti in maniera tale da poterli replicare con un braccio robotico.
In questa particolare tipologia robotica, stanno assumendo un ruolo sempre più rilevante le attrezzature medicali, in particolare i tavoli operatori descritti in precedenza. Si parla, infatti, di veri e propri tavoli operatori robotici.
ROBOTICA DI IMAGING
Un’ulteriore applicazione dei robot medicali è l’acquisizione di immagini diagnostiche (imaging). In questa tipologia assume un’importanza fondamentale l’ingegnerizzazione di quei sistemi che svolgono la loro funzione tramite il movimento di componenti spesso molto vicini al paziente. Il limitatore di coppia visto all’inizio trova largo impiego nei sistemi di imaging per ortopantomografia (radiografia panoramica delle arcate dentarie o ortopanoramiche).
ROBOTICA PROTESICA E RIABILITATIVA
Dopo la riabilitazione iniziale, gran parte dei pazienti colpiti da ictus ritorna alla loro vita quotidiana, spesso senza recuperare la loro mobilità originaria. Per tali scopi, sono stati sviluppate diverse tipologie di robot per la riabilitazione, anche di piccole dimensioni e semplici nei meccanismi. Scopo di questi robot è quello di attuare movimenti semplici e ripetitivi per il recupero della mobilità. Altri robot per la riabilitazione presentano la configurazione ad esoscheletro; essi sono largamente impiegati per migliorare la mobilità dei pazienti affetti da paralisi agli arti. La robotica protesica, invece, consente la sostituzione degli arti superiori per i pazienti che hanno perso una o entrambe le braccia a causa di incidenti. In entrambe le soluzioni, la scelta dei corretti giunti deve fare fronte alle esigenze di una movimentazione altamente precisa, come quella delle protesi di tipo neurale. In questo settore, la ricerca apre scenari sempre più interessanti ed entusiasmanti. Un esempio eclatante è il progetto Muscle Atrophy Research and Exercise System (MARES) dell’ESA.

L’IMPORTANZA DEI COMPONENTI
Un’attività complessa come la progettazione nell’ambito della robotica medicale, può trovare un valido supporto nei fornitori di componenti. È il caso di R+W, azienda leader nella produzione di giunti e alberi di trasmissione, in grado di mettere la sua esperienza a disposizione del progettista. Nel settore della robotica medicale, R+W fornisce una gamma completa di soluzioni per tutte le esigenze di trasmissione e limitazione della coppia, quali: giunti a soffietto metallico della serie MK e BK, giunti ad elastomero della serie EK e limitatori di coppia serie SK.
I giunti a soffietto metallico in miniatura MK costituiscono una combinazione vincente di prestazioni eccellenti e ingombro ridotto. La gamma di giunti MK è decisamente ampia (decine di modelli suddivisi in dieci serie) e consente di trovare il giunto ideale per ogni applicazione, ferma restando la capacità e disponibilità dei tecnici di R+W di trovare soluzioni ad hoc per particolari esigenze.
La serie MK4, una delle più utilizzate, comprende diversi modelli, tutti di dimensioni contenute (diametro esterno dai 15 ai 40 mm) per valori di coppia nominale da 0,5 a 10 Nm. Come tutti i prodotti R+W, i giunti miniaturizzati a soffietto metallico MK4 sono realizzati in materiali di alta qualità: acciaio inox ad alta flessibilità (per i soffietti) e alluminio (per i mozzi). Adatti per velocità di rotazione fino a 20.000 giri al minuto (e oltre, con apposita bilanciatura), sono assolutamente privi di gioco, torsionalmente rigidi, compensano ogni tipo di disallineamento (assiale, angolare e laterale) e presentano un ridotto momento d’inerzia. Fra le caratteristiche più apprezzate di questi giunti, la grande facilità di montaggio e smontaggio e la totale assenza di necessità di manutenzione.
Anche i giunti BK, precisi e senza gioco, sono molto apprezzati per il basso momento di inerzia, la totale assenza di necessità di manutenzione, la durata praticamente infinita e soprattutto la totale affidabilità.
I giunti a elastomero della serie EK sono stati sviluppati proprio con in mente la robotica: gli inserimenti a elastomero combinano elevata flessibilità e buona resistenza. Smorzano vibrazioni e impatti compensando i disallineamenti degli alberi.
Molti elementi condizionano la progettazione dei giunti a elastomero: da fattori quali il carico, l’avviamento e la temperatura dipende la durata dell’inserto. L’elemento elastomerico è disponibile in diverse durezze shore, per trovare sempre un compromesso adatto fa le proprietà di smorzamento, la rigidità torsionale e la correzione dei disallineamenti per la maggior parte delle applicazioni.
I limitatori di coppia SK, assolutamente privi di gioco, permettono di proteggere il sistema motore in caso di sovraccarico, scollegandolo dalla parte condotta nel giro di pochi millisecondi. Estremamente precisi, trasmettono la coppia con gande accuratezza e intervengono solo in caso di effettiva necessità. Inoltre consentono un riarmo semplice e rapido non appena viene rimossa la causa del sovraccarico.
R+W Italia si propone sul mercato come partner ideale per la fornitura di giunti, alberi di trasmissione e limitatori di coppia standard e “speciali”, sviluppati su specifica richiesta del cliente con l’obiettivo di offrire il giunto corretto per ogni singola applicazione: l’ampia gamma di prodotti comprende soluzioni per tutte le esigenze.